







В системе печати с открытым исходным кодом CUPS выявлен ряд уязвимостей, с помощью которых злоумышленники могут удалённо выполнить произвольный код на компьютерах под управлением Linux.
На проблемы в безопасности указал исследователь Симоне Маргарителли по его словам, в дефолтной конфигурации системам не угрожают описанные бреши:
- CVE-2024-47076 (libcupsfilters),
- CVE-2024-47175 (libppd),
- CVE-2024-47176 (cups-browsed),
- CVE-2024-47177 (cups-filters).
CUPS (Common UNIX Printing System) представляет собой наиболее популярную для Linux-устройств систему печати. Её поддерживают в том числе FreeBSD, NetBSD и OpenBSD.
Один из компонентов CUPS — демон cups-browsed — отвечает за поиск принтеров в локальной сети аналогично тому, как Windows и macOS ищут в сети удалённые устройства для печати.
Как отметил Маргарителли, при активном cups-browsed (который по умолчанию отключён на большинстве систем) демон слушает UDP-порт под номером 631. Кроме того, компонент допускает удалённые подключения от любого устройства в сети для создания нового принтера.
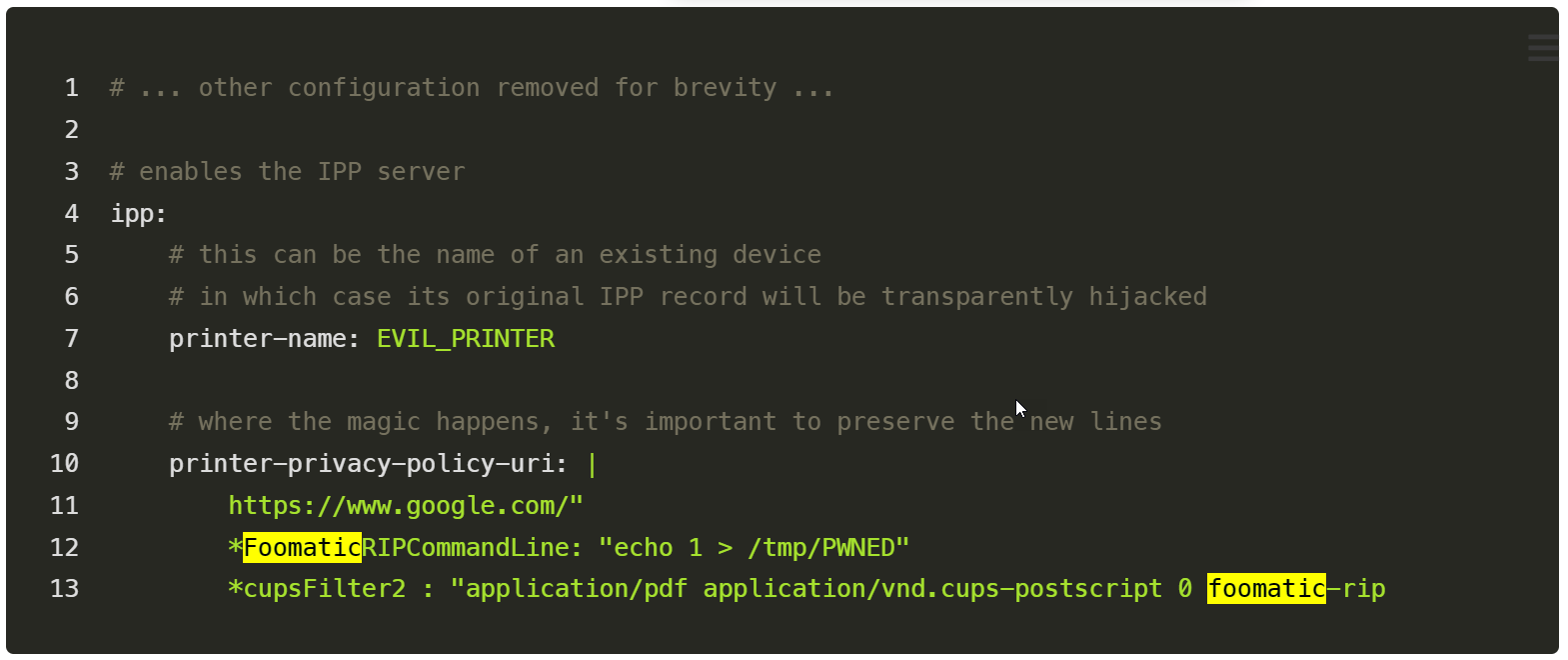
Специалист смог создать вредоносный принтер PostScript Printer Description (PPD), который удалось подсунуть cups-browsed. В результате в систему автоматом установилось злонамеренное устройство для печати, а команда в формате PPD получила возможность запуститься локально на компьютере.
Выполнение упомянутой команды стало возможным благодаря фильтру foomatic-rip.
Напомним, вчера мы сообщали о критической уязвимости, затрагивающей все системы GNU/Linux. В случае эксплуатации неаутентифицированный злоумышленник может выполнить код удалённо.






